塑性研究院谢叻教授在中国第六届机器人峰会作邀请报告
2019/5/31 13:55:10
2019年5月,材料学院塑性成形与装备研究院教授谢叻应邀出席第六届中国机器人峰会,并作了题为《微创手术机器人技术》的邀请报告。
随着5G通信技术的发展,5G时代即将到来,机器人参与的远程手术操作将更加简便。在全球各国科技竞争的大背景下,医疗机器人成为竞争激烈的技术和战略布局关键之一。麦肯锡全球研究所也早已将手术机器人列入12项引领全球经济变革的颠覆性技术之中,如今规模化使用机器人成了医疗领域的大势所趋,手术机器人应用越来越广泛,作为行业发展趋势之一的微创式手术也为手术机器人提供很大的发展空间。

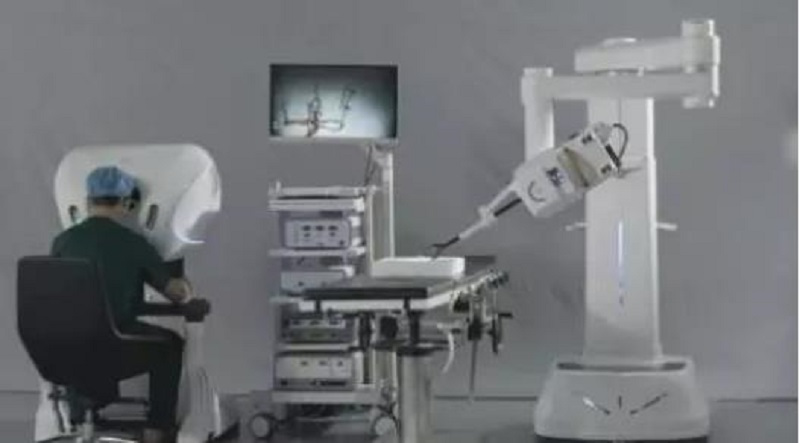
微创手术机器人分为主手、从手和内窥镜三部分。谢叻教授及其所在实验室开展了十多年的系统研究,在做出七自由度的从手后发现,虽然可以做剪、夹、钳的操作,但仍缺少力反馈。如果遇到较硬的部分不容易剪得动,会使主从手之间失去反馈,因此需要完全依靠医生的视觉,这加大了操作的难度。为了实现力反馈,需要在前端添加力传感器。但商业化的产品最小关键尺寸也要17毫米,于是谢叻教授团队自主研制了9.5毫米的力传感器。
除了从手外,主手上的力感知也十分重要。谢叻团队研制的主手中有九个电机,每个电机都会根据每个关节的角度来计算位置,提供力反馈。在机器视觉方面,谢叻教授认为:医生在通过手术机器人内窥镜进行切割、止血和缝合等操作时,由于内窥镜大部分缺少深度,需要医生长期训练才能实现预期的目标。由于对操作会产生约束,需要立体视觉,因此虚实结合常会有时差。
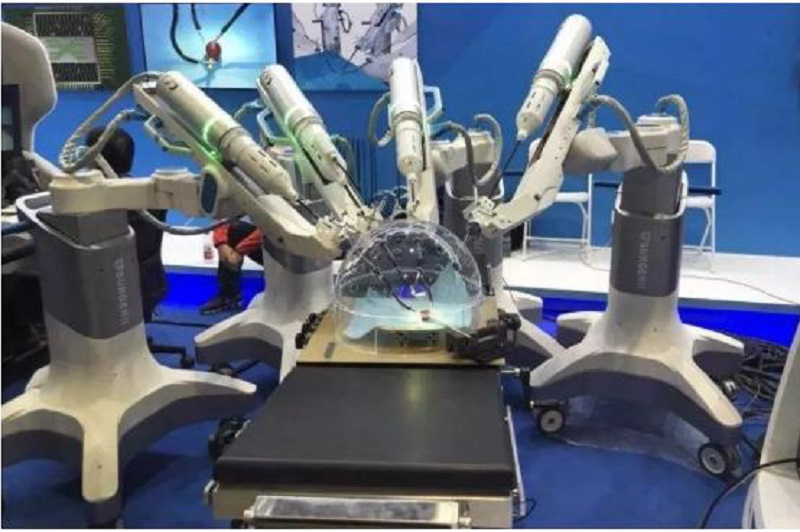
全球很火的“达芬奇”手术机器人可以做心脏、肝脏和泌尿等方面的手术,此外,还有许多专科手术机器人。谢叻教授以血管介入手术机器人为例,指出血管介入手术是治疗心脑血管疾病的重要方法之一。手术医生长时间受到X光辐射,会对身体造成不良的影响。手术医生需要穿厚重的铅衣,容易产生疲劳,手抖等人为因素会增加手术风险,影响手术成功率。
面对上述诸多问题,机器人则可以轻松地克服,将操作医生隔离在手术房间外,从而保护了医生的身体。由于血管是分叉的,普通手术时,在哪里插管介入完全依靠医生的手感和立体感,但机器人在力反馈上依然是一个难点。医生操作时需要使用细铁管、塑料管和治疗导管三种管子,最后放支架。谢叻在理顺流程后,用两个自由度,从前往后推、旋转和摩擦轮等方式进行操作,使后端力传感器能够感受到力。
在腹腔镜手术中,以往都是通入空气使腹部鼓起来形成空腔,而谢叻介绍了日本学者的思路,导入生理盐水,使手术环境变为类似水下环境中使用手术机器人。但该方法在机器人移动、电机体积、腹部打洞尺寸、相关工艺和功能上都有很大难度。因此,这个方案仍在逐渐完善中。随着深度学习、人机协作等技术应用的发展,微创手术领域的各项手术必然会在微型机器人的助力下迎来新的时代,为患者带来福音。
稿件信息来源:中国机器人峰会